网络
nuxt.js
spark
回归
文件批量重命名
NAND
夺旗赛
defer
unix
渲染
two sum
iot
pgbackrest
r语言
pdf
uml
委托传值
栈
Java中的File类
游戏程序
卡尔曼滤波
2024/4/11 20:58:56
kalman滤波理解二:预测和更新过程
这篇主要讲kalman滤波的预测和更新过程,首相强调以下上篇(kalman滤波理解一:理论框架)所强调的连个理论原则:
预测过程符合全概率法则,是卷积过程,即采用概率分布相加;感知过程符合…
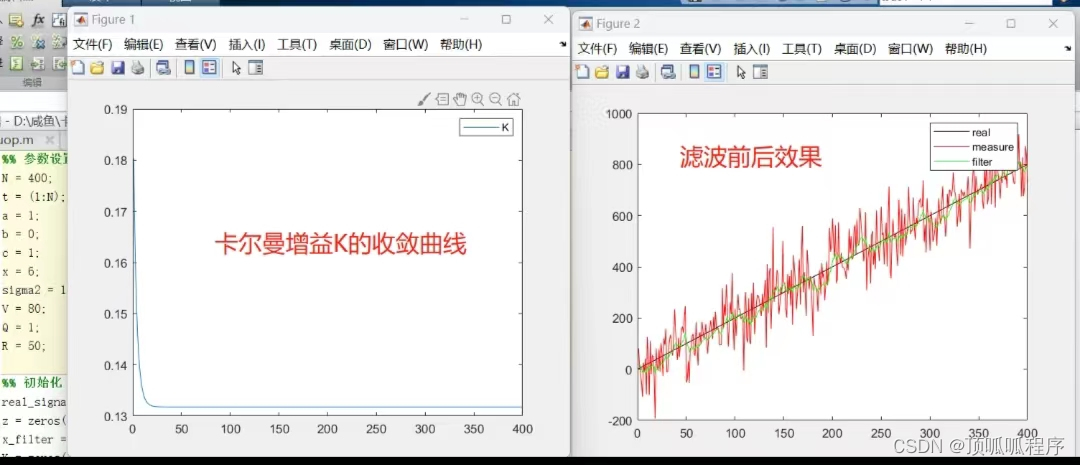
02基于matlab的卡尔曼滤波
基于matlab的卡尔曼滤波,可更改状态转移方程,控制输入,观测方程,设置生成的信号的噪声标准差,设置状态转移方差Q和观测方差R等参数,程序已调通,需要直接拍下。
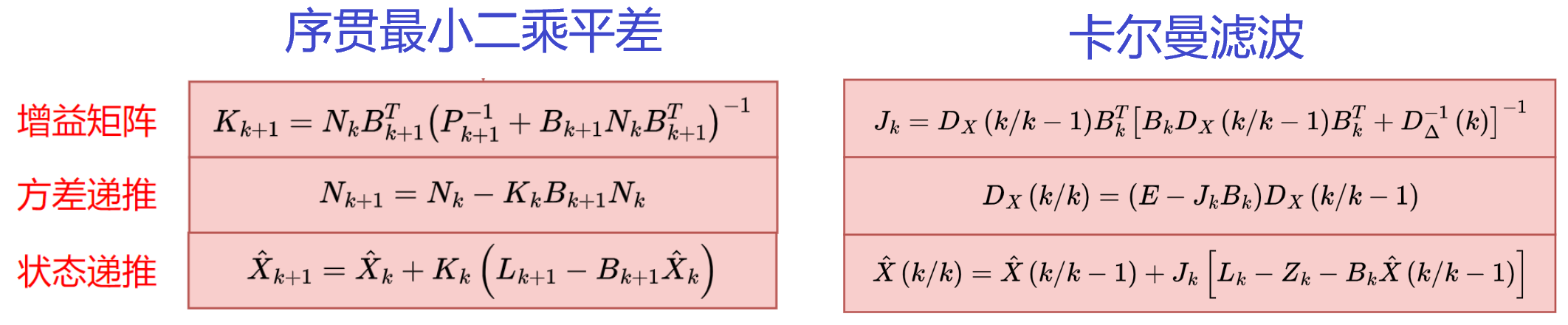
序贯最小二乘平差 VS 卡尔曼滤波
文章目录 Part.I IntroductionPart.II 概念比较Chap.I 序贯最小二乘平差Chap.II 卡尔曼滤波Chap.III 比较 Reference Part.I Introduction
序贯最小二乘平差和卡尔曼滤波有些相似,但是还是有一些区别:
序贯最小二乘平差用来处理静态数据,也…
卡尔曼家族从零解剖-(06) 一维卡尔曼滤波编程实践
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系…
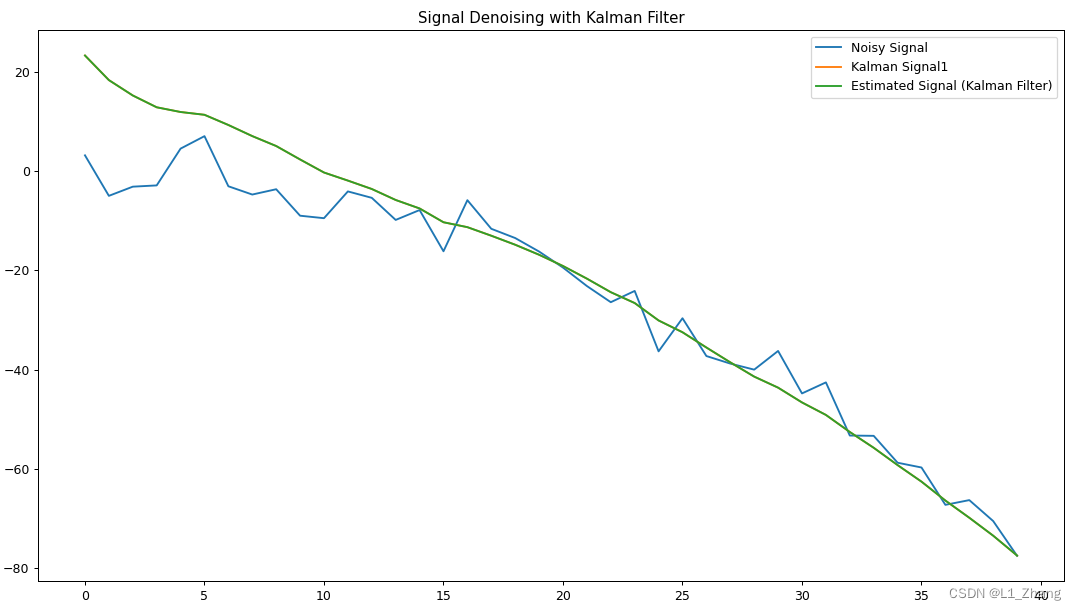
卡尔曼滤波之二:Python实现
卡尔曼滤波之二:Python实现 1.背景描述2.构建卡尔曼滤波公式2.1 预测2.2 更新 3.代码实现3.1 输入值3.2 pykalman包实现3.3 不使用Python包实现3.4 效果可视化 参考文献 了解了卡尔曼滤波之一:基本概念,可以结合代码来理解下卡尔曼滤波的2个预…
自动驾驶学习笔记(七)——感知融合
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
感知融合
卡尔曼滤波
融合策略
实…
卡尔曼滤波(KF)和增广卡尔曼滤波(EKF)实现
卡尔曼滤波(KF)
python实现:
import numpy as npF np.array([[1, 1], [0, 1]]) # 状态转移矩阵 X(k1)[[1, Δt], [0, 1]]*X(k) Δt1
Q 0.1 * np.eye(2, 2) # 过程噪声协方差矩阵
R 0.1 * np.eye(2, 2) # 观测噪声协方差矩阵 …
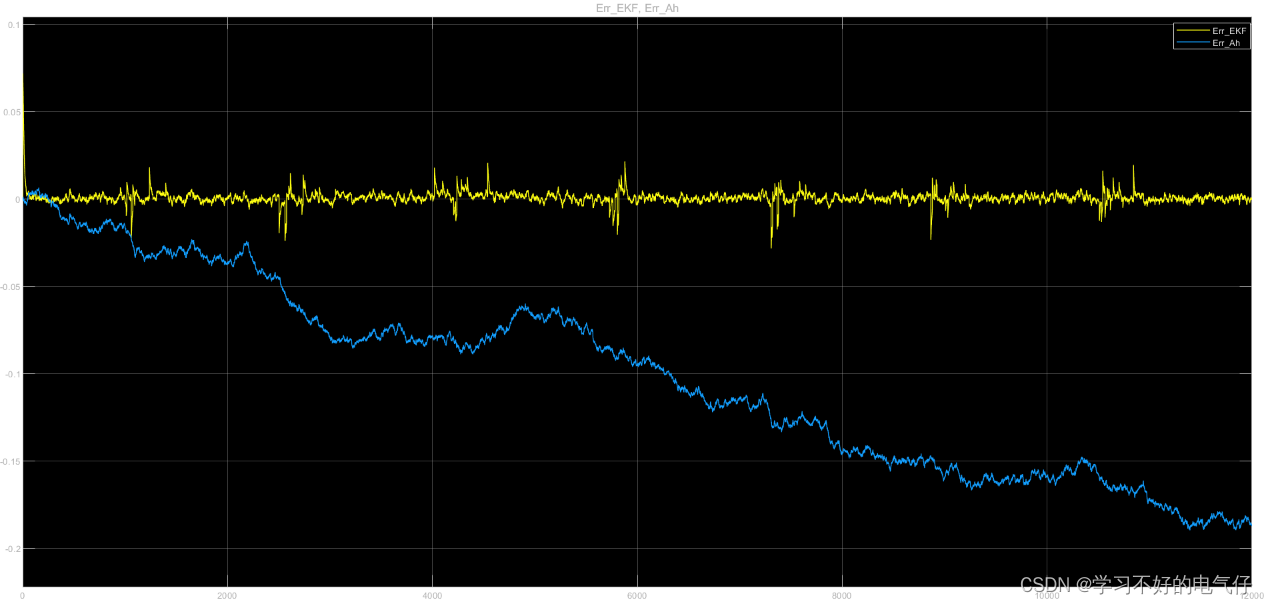
基于卡尔曼滤波的锂电池状态估计MATLAB仿真及程序
完整资源请查看主页置顶博客(专享优惠)
该项目的目的是估计锂电池的荷电状态(SOC)。主要完成了扩展卡尔曼滤波(EKF)的实验、参数辨识和仿真。
项目中包括锂电池模型建立、参数辨识与验证、SOC估计采用扩展卡尔曼滤波(EKF),使用了两种方式实…
卡尔曼家族从零解剖-(01)预备知识点
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系…
卡尔曼家族从零解剖-(02)贝叶斯滤波-知其所以然
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系…
卡尔曼家族从零解剖-(07) 高斯分布积分为1,高斯分布线性变换依旧为高斯分布,两高斯函数乘积仍为高斯。
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系…

卡尔曼滤波的理解以及参数调整
一、前言
卡尔曼滤波器是一种最优线性状态估计方法(等价于“在最小均方误差准则下的最佳线性滤波器”),所谓状态估计就是通过数学方法寻求与观测数据最佳拟合的状态向量。
在移动机器人导航方面,卡尔曼滤波是最常用的状态估计方…
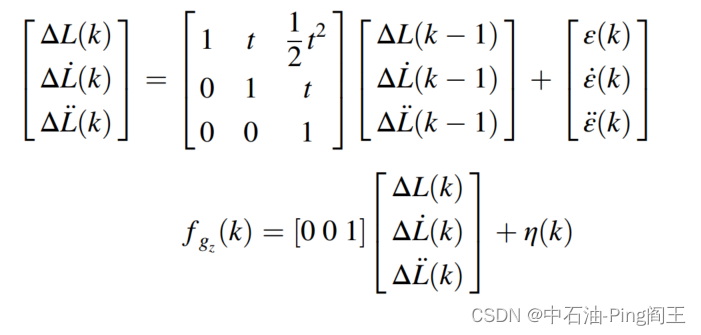
课题学习(八)----卡尔曼滤波动态求解倾角、方位角
一、 卡尔曼滤波 卡尔曼滤波的应用要求系统和底层过程的测量模型都是线性的。离散时间线性状态空间系统的描述为: x k Φ k , k − 1 x k − 1 G k − 1 w k − 1 x_k\Phi_{k,k-1}x_{k-1}G_{k-1}w_{k-1} xkΦk,k−1xk−1Gk−1wk−1 式中 Φ k , k − 1 \Phi_{…

基于卡尔曼滤波实现行人目标跟踪
目录 1. 作者介绍2. 目标跟踪算法介绍2.1 目标跟踪背景2.2 目标跟踪任务分类2.3 目标跟踪遇到的问题2.4 目标跟踪方法 3. 卡尔曼滤波的目标跟踪算法介绍3.1 所用数据视频说明3.2 卡尔曼滤波3.3 单目标跟踪算法3.3.1 IOU匹配算法3.3.2 卡尔曼滤波的使用方法 3.4 多目标跟踪算法 …
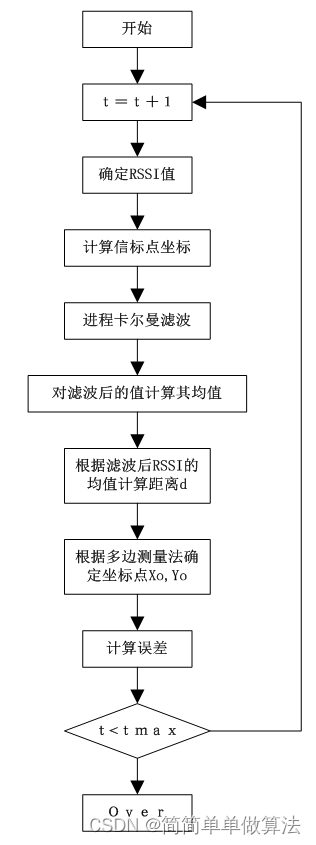
基于PLE结合卡尔曼滤波的RSSI定位算法matlab仿真
目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本
MATLAB2022a
3.部分核心程序
...............................................................
for Num_xb Num_xb2Num_…

卡尔曼滤波器笔记——最详细
笔记来源—
卡尔曼滤波算法原理及代码实现!https://www.bilibili.com/video/BV1WZ4y1F7VN/?spm_id_from333.337.search-card.all.click&vd_source8d55784dc9c7530bc9e3fa220380be56 简单介绍一下
现在我们就是不知道是距离多少,就需要用到这个卡尔…
2D平面机器人运动ESKF过程相关方程推导
2D平面运动相关状态量及符号约定
机器人(Robot)状态:世界系下位置(Positon)记为 P R ∣ x R y R ∣ P_R\begin{vmatrix} x_R \\ y_R \end{vmatrix} PR xRyR ,世界系下航向(orientation)记为 Φ \Phi Φ; 路标点(Landmark)状态:…

【滤波】多元卡尔曼滤波器
本文主要翻译自rlabbe/Kalman-and-Bayesian-Filters-in-Python的第6章节06-Multivariate-Kalman-Filters(多元卡尔曼滤波器)。
%matplotlib inline#format the book
import book_format
book_format.set_style()简介
我们现在准备研究和实现完整的、多…
常见信号滤波方法(卡尔曼滤波、滑动平均、异常值剔除)的原理解析与C语言实现
常见信号滤波方法(卡尔曼滤波、滑动平均、异常值剔除)的原理解析与C语言实现
日期作者版本备注2023.09.04Dog TaoV1.0完成文档的初始版本。 文章目录 常见信号滤波方法(卡尔曼滤波、滑动平均、异常值剔除)的原理解析与C语言实现前…

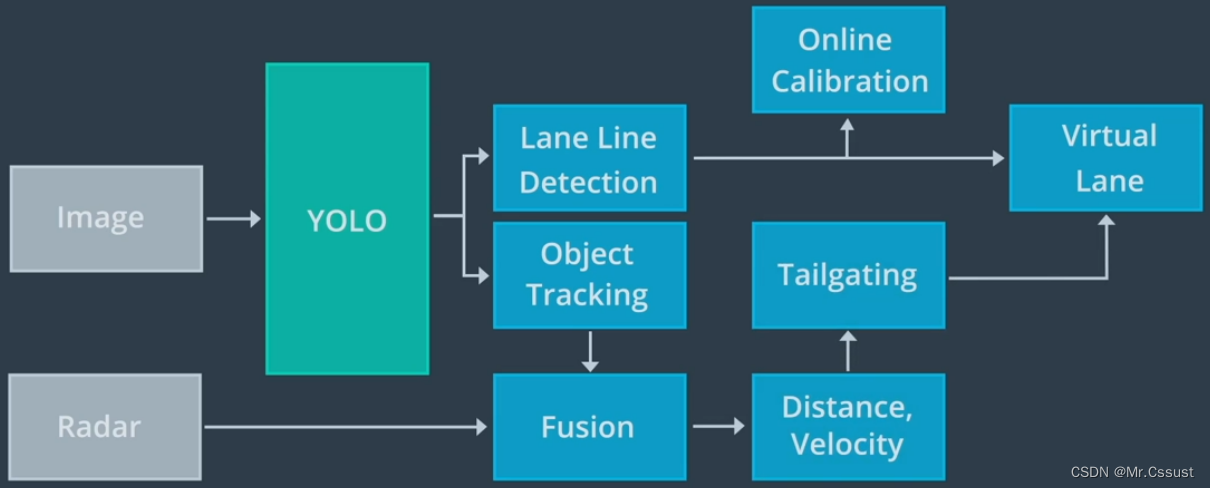
卡尔曼滤波器在车流量检测中的应用
目录 1. 作者介绍2. 卡尔曼滤波器2.1 卡尔曼滤波概述2.2 标志性发展2.3 卡尔曼公式理解 3. 车流量检测3.1 背景介绍3.2 实现过程3.2.1 YOLOv3网络模型结构3.2.2 SORT算法3.2.3 基于虚拟线圈法的车辆统计 4. 算法实现4.1 Kalman.py4.2 完整代码4.3 结果展示 1. 作者介绍
吴思雨…
Python卡尔曼滤波器OpenCV跟踪和预测物体的轨迹
模拟简单物体二维运动和预测位置
预测数学式
想象一下你正坐在一辆汽车里,在雾中行驶。 你几乎看不到路,但你有一个 GPS 系统可以告诉你你的速度和位置。 问题是,这个 GPS 并不完美; 它有时会产生噪音或不准确的读数。 您如何知…

各种滤波算法的比较(GF、KF、EKF、UKF、PF)
目录
一、前言
二、滤波算法介绍
1、GF(高斯滤波)
2、KF(卡尔曼滤波)
3、EKF(可扩展卡尔曼滤波)
4、UKF(无迹卡尔曼滤波)
5、PF(粒子滤波)
三、不同滤…

Echarts动态卡尔曼滤波
陈拓 2020/12/08-2020/12/19
1. 概述
在正弦波上叠加高斯白噪声,再用卡尔曼滤波滤除噪声。 相关文档: 《Echarts动态生成sin曲线》https://blog.csdn.net/chentuo2000/article/details/110622403 《Echarts动态产生高斯白噪声》https://blog.csdn.net/…
卡尔曼家族从零解剖-(06)一维卡尔曼滤波编程实践
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系…

【卡尔曼滤波的学习,以及一些理解】
卡尔曼滤波的一些理解 优秀的博客推荐直观理解卡尔曼滤波核心算法举个例子 最近两个多月在实习,做的是GPS定位相关的一些工作,同时也简单做了一下组合导航。卡尔曼滤波是组合不同传感器比较核心的算法,应用也比较广泛,也有很多文章…

KF-GINS源码阅读(下)
文章目录 七、捷联惯导更新:insPropagation()1、insPropagation():捷联惯导递推2、imuCompensate():IMU数据误差补偿3、insMech():IMU 状态更新(机械编排)4、velUpdate():速度更新1. 算法2. 代码…

【滤波】设计卡尔曼滤波器
本文主要翻译自rlabbe/Kalman-and-Bayesian-Filters-in-Python的第8章节08-Designing-Kalman-Filters(设计卡尔曼滤波器)。
%matplotlib inline#format the book
import book_format
book_format.set_style()简介
在上一章节中,我们讨论了教…
kalman滤波理解三:协方差矩阵的计算
在整个kalmam滤波的操作过程中,有3个协方差矩阵是需要特殊注意的,也是很多人使用时不知如何设置和更新的,分别是状态协方差矩阵P,过程噪声协方差矩阵Q,测量噪声协方差矩阵R。
(一)状态协方差矩…

自动驾驶中的多目标跟踪_第二篇
自动驾驶中的多目标跟踪:第二篇
上一节介绍了多目标跟踪的定义、应用场景和类型以及面临的挑战;在这一节,我们回顾贝叶斯滤波,简单介绍运动模型和量测模型,卡尔曼滤波等。 附赠自动驾驶学习资料和量产经验:链接
贝叶…

自动驾驶中的传感器融合算法:卡尔曼滤波器和扩展卡尔曼滤波器
自动驾驶中的传感器融合算法:卡尔曼滤波器和扩展卡尔曼滤波器 附赠自动驾驶学习资料和量产经验:链接
介绍:
追踪静止和移动的目标是自动驾驶技术领域最为需要的核心技术之一。来源于多种传感器的信号,包括摄像头,雷达…

基于蓝牙和IMU的卡尔曼滤波融合算法、扩展卡尔曼滤波算法
前言
看了大量的多源融合室内定位论文,都绕不开卡尔曼滤波和扩展卡尔曼滤波算法。相当经典,但是又缺少代码。 由于计算机专业不学这些算法,因此理解起来难度还有点大。因此业余抽空复现了下,话不多说,直接上代码。
蓝牙和IMU的卡尔曼滤波融合
from filterpy.kalman imp…

卡尔曼家族从零解剖-(06) 一维卡尔曼滤波编程(c++)实践、透彻理解公式结果
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系…
卡尔曼滤波(Kalman Filter)C#测试
一、操作过程
刚学了一下卡尔曼滤波,具体原理还没细看,大致过程如下 分为两步,第一步Predict,以下两个公式 第二步Correct,以下三个公式 公式看起来很复杂,其中是我们要处理的数据, 是滤…
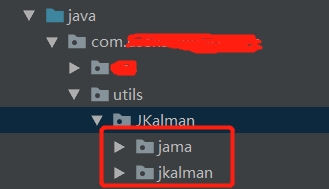
JKalman滤波的使用(java实现的卡尔曼滤波)
JKalman是一个开源项目,利用java实现的卡尔曼滤波,本文主要记录在项目中的使用记录。 1. 官网的源码下载:JKalman download | SourceForge.net 保存到百度网盘的源码及卡尔曼介绍文档下载:JKalman-1.0.zip_免费高速下载|百度网盘-…

基于卡尔曼滤波的视频跟踪,基于卡尔曼滤波的运动小球跟踪
目录
完整代码和数据下载链接:基于卡尔曼滤波的视频跟踪,基于卡尔曼滤波的运动小球跟踪(代码完整,数据齐全)资源-CSDN文库 https://download.csdn.net/download/abc991835105/88738577 卡尔曼滤波原理 RBF的定义 RBF理…

卡尔曼滤波 - 状态空间模型中的状态方程
卡尔曼滤波 - 状态空间模型中的状态方程
flyfish
状态方程和观测方程统称为状态空间模型
位移 位移Δxxf−x0\text { 位移}\Delta xx_f-x_0位移Δxxf−x0 x0x_0x0 是起始位置 xfx_fxf 是终止位置 在坐标轴里,右边是正,左边是负
面积等于物体…
卡尔曼家族从零解剖-(05)卡尔曼滤波→公式推导,应用通俗讲解,c++代码示例
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系…
如何避免卡尔曼滤波器的发散? Q P R参数怎么调?
文章目录 1.什么是发散2.发散的原因3.解决方法4.参数意义及调试方法5.工程经验(1)抑制P矩阵发散(2)抑制K矩阵发散1.什么是发散 当滤波的实际误差远远超过滤波误差的允许范围,甚至于趋向无穷大,使得滤波器推动作用,这种现象叫做滤波的发散。
2.发散的原因
(1)系统的…
机器学习实践系列之5 - 目标跟踪
提到 目标跟踪(Object Tracking),很多专业人士都不陌生,它是计算机视觉里面 用于视频分析的一个很大的分类,就像目标检测一样,是视频分析算法的底层支撑。 目标跟踪的算法有很多,像 Mean-Shift、…

卡尔曼滤波(Kalman filter)公式推导详细版
卡尔曼滤波(Kalman filter)公式推导详细版 记得很早的时候,我曾经手工推导过卡尔曼滤波,但是之前的已经大多记不起来了。今天帮着老师整理PPT的时候,老师让我补充完相应的推导相关的内容。所以今天就借着这个机会一并写…
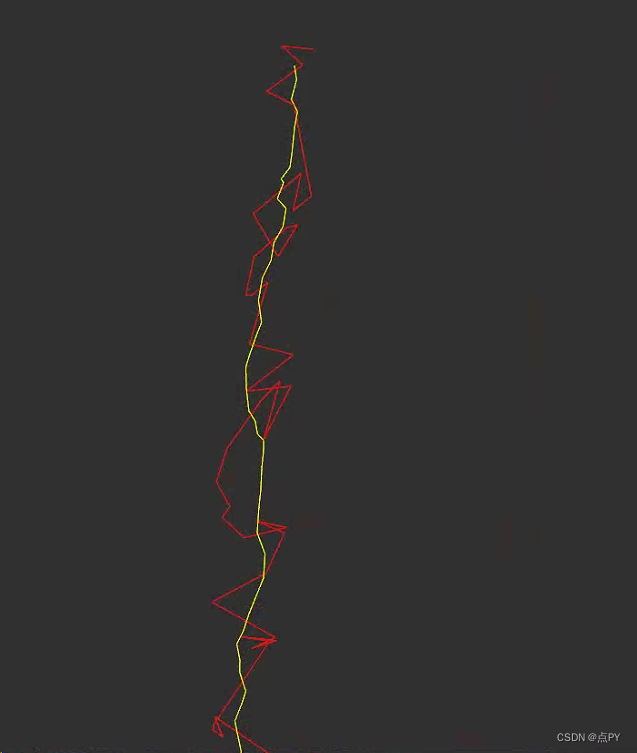
基于卡尔曼滤波的平面轨迹优化
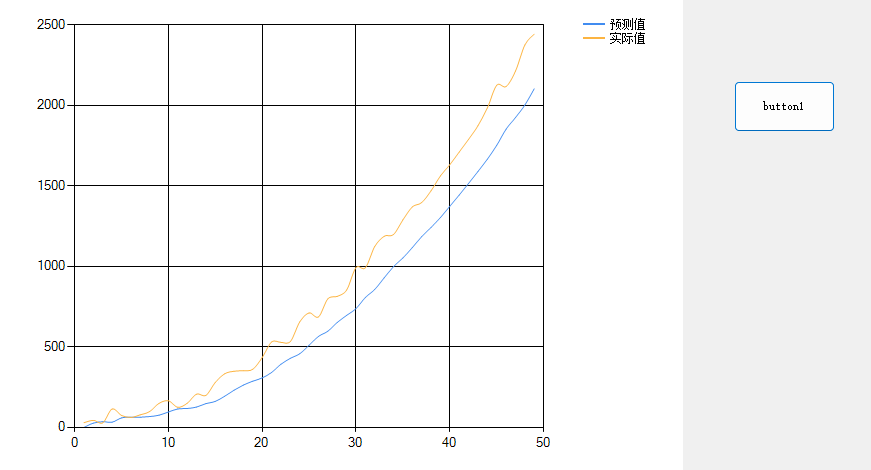
文章目录 概要卡尔曼滤波代码主函数代码CMakeLists.txt概要
在进行目标跟踪时,算法实时测量得到的目标平面位置,是具有误差的,连续观测,所形成的轨迹如下图所示,需要对其进行噪声滤除。这篇博客将使用卡尔曼滤波,对轨迹进行优化。 优化的结果为黄色线。
卡尔曼滤波代码…
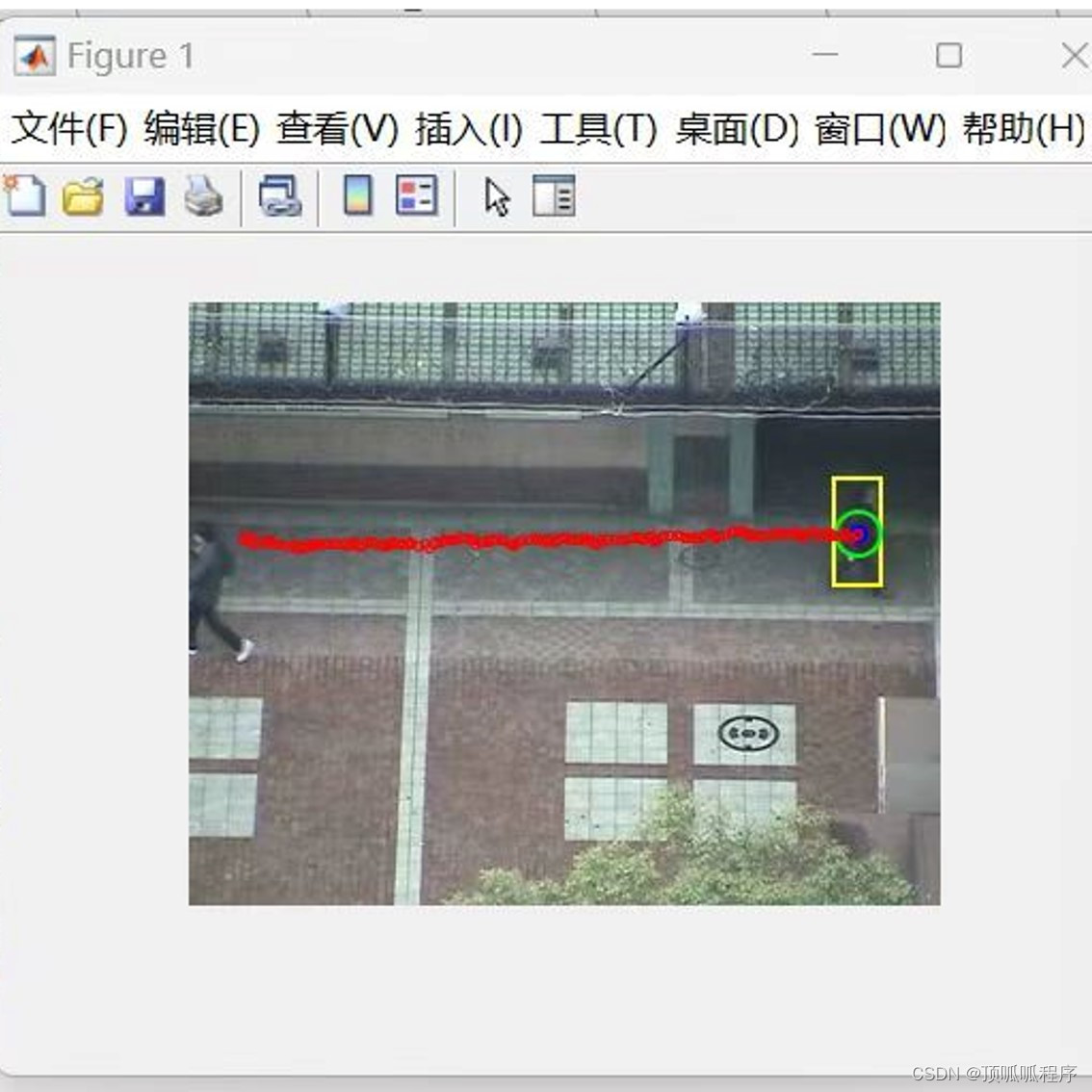
17基于matlab卡尔曼滤波的行人跟踪算法,并给出算法估计误差结果,判断算法的跟踪精确性,程序已调通,可直接运行,基于MATLAB平台,可直接拍下。
17基于matlab卡尔曼滤波的行人跟踪算法,并给出算法估计误差结果,判断算法的跟踪精确性,程序已调通,可直接运行,基于MATLAB平台,可直接拍下。 17matlab卡尔曼滤波行人跟踪 (xiaohongshu.com)

SORT 多目标跟踪算法笔记
SORT 是一种简单的在线实时多目标跟踪算法。文章要点为:
以 IoU 作为前后帧间目标关系度量指标;利用卡尔曼滤波器预测当前位置;通过匈牙利算法关联检测框到目标;应用试探期甄别虚检;使用 Faster R-CNN,证明…